 |
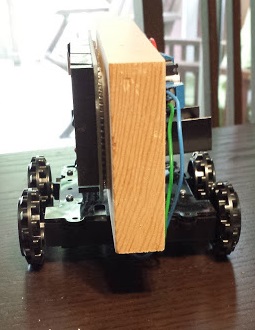
| Arduino Mega mounted vertically on a slab of scrap wood |
I got the first Zumo based robot built and running this evening. For some reason, I decided to mount the arduino and h-bridge vertically on a slab of wood, then mounted the wood to the chassis. This wasn't hard. I had the most trouble with re-soldering the wire leads to the motors and I may have damaged one of the motors in the process.
Once I got the bot mostly working, I loaded the rover bot code. I had no trouble getting the code to run on the arduino mega (clone).
In general, the Zumo track driven chassis and motors show promise in getting a small bot over wood floors and rugs. I hope to swap out the motors soon, then focus on programming the bot. I also need to mount the radio, wheel encoders, and compass. And, it needs lights, lots of blinking lights.
More about the build here
 |
| arduino on left, h-bridge on right -- mounted on a scrap of wood |
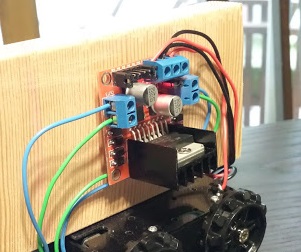
h-bridge mounted with thick 2 sided tape
 | |
| 4x AA batteries below the bot |
 | |
| can't wait to race |
Random Notes:
- I attached a chunk of scrap wood vertically to the Zumo chassis
- I used double-sided tape to mount the arduino, range finder, and h-bridge to the wood
- Pololu 100:1 metal gear motors
- tiny
- 1 of 2 motors not working well, the gears drag and make buzzing noise
- robot pulls hard left
- I had trouble with intermittent noise and drag with the left Pololu 100:1 metal gear motor
- I'm guessing this is a mechanical problem with the gears.
- I had to replace the wires that I originally soldered to the motors
- de-soldering was difficult. yuck
- may have damaged motor?
- The new thicker wires are good, but block the battery door
- batteries have dropped out when the bot goes over bumps
- I will try swapping out the 100:1 motors with 50:1 ones that I have
- Voltage issue (may be related to left motor)?
- seems like the bot doesn't get consistent power.
- The sticky motor may drag the voltage down.
- it seems like there is some kind of voltage problem,
- perhaps loose wires
- shaking wires around h-bridge seemed to match changes in motor performance
- bot worked well when plugged into usb or with the 9v battery (later mounted on top)

